本研究では筋骨格系モデルを用いて人体動作を生成する手法を提案してきた。
まず、Delp や van der Helm などの研究で発表されている筋肉の付着位置を用いて上半身及び下半身の筋骨格モデルを作成した。動作を生成する際、変数として動作を表す一般化座標を用い、動作を通じてHillの筋力モデルを使い筋力を推定する。筋力に基づく目的関数を最適化することにより、歩行動作、キック動作等を生成してきた。
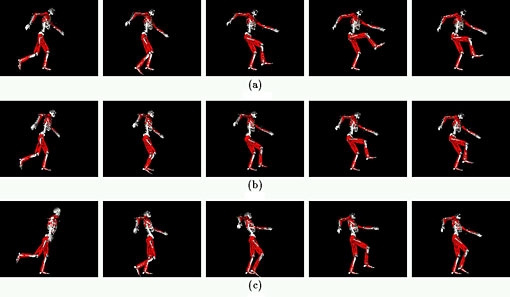
各筋肉の最大筋力、疲労度を表す乳酸値を変化させることにより、筋力が上がった時に動作がどのように変化するか、あるいは疲れてきた時にどのように動作が変化するかを計算できるようにした。
図I(a)-(c)にキックを繰り返し徐々に疲れていく様子を示す。
|
歩行動作の計算を行う際、バランスを取りながら歩くことが問題となる。
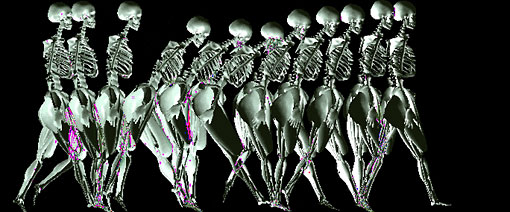
そのため、本研究ではロボティクスの研究を参考に、解析的に人間の歩行動作の重心軌道、及び重心の回りの角運動量を表す計算モデルを提案し、それに基づき、一般化座標は逆運動学を用いて計算するようにした。また、ここで提案している各運動量、重心軌道のモデルを用い、大きな外力が人間に加わった際にバランスを取りながら歩き続ける人間の動作を再現する手法を提案した。図2に歩行動作の最中に後ろから強く押された後、バランスを回復する動作の例を示す。
研究の応用分野としては医療、理学療法、アニメーション等が考えられる。 |
|