As a part of this project, we performed a study on the mechanical computer simulations of human body movements. In particular, we focused on the behavior of the nervous, muscular, and skeletal systems and studied the behavior of different parts of the human body during movements in daily life and sports. Further, we investigated appropriate training methods that can enhance the performance in sports motion.
The study addressed topics for which it is difficult to conduct experiments. We applied computer simulation techniques for such topics and obtained interesting results. The approaching method employed in this study is considered to be effective for obtaining significant contribution not only in the fields that we have studied but also in the field of medical care and rehabilitation. The topics that we have studied thus far are individually outlined below. |
|
| [1] Computer simulation of jumping motion |
|
|
We constructed two-dimensional models of the nervous, muscular, and skeletal systems and simulated jumping motion by using these models. The model of the lower limb consists of four skeletal segments—the trunk, upper leg, lower leg, and foot—and six lower-limb muscle groups attached to the skeletal system (Fig. 1). By using the data on the jumping motion generated by the simulation, we evaluated the effect of the measurement error present in the experimental data on the computational method of inverse dynamics ( --> see Reference (1)). The result indicates that the errors that occurred while determining the joint positions significantly affected the computational results. Furthermore, by using this model, we evaluated the effect of training for the development of the lower-limb muscular groups on the vertical jump height ( --> see Reference (2)). We found that training for developing the extension muscle of the knee joint was effective in increasing the vertical jump height.
|
|
|
| Fig. 1 Two-dimensional simulation model of the human lower limb with six lower-limb muscle groups attached to the skeletal system. |
|
|
| [2] Consideration of the behavior of the muscle-tendon complex in the human ankle |
|
|
Using a two-dimensional model of the ankle, we simulated the behavior of the muscle-tendon complex during physical exercise. We studied the mechanical behavior of the contraction components (muscle) and the series elastic components (tendon) during a periodical plantar flexion movement (--> see Reference (4)). The result indicates that when the duration of the motion was shorter, there was an increased contribution of the tendon to the mechanical output of the muscle.
We studied the relationship between the moment arm length of the ankle and the mechanical output ( --> see Reference (5)). At a high motion speed, the shorter moment arm was found to provide a larger mechanical output. |
|
| [3] Construction of a three-dimensional simulation model of the human body |
|
|
|
|
| Fig. 2 Three-dimensional simulation model of the human lower limb with 86 lower-limb muscle groups attached to the skeletal system. |
|
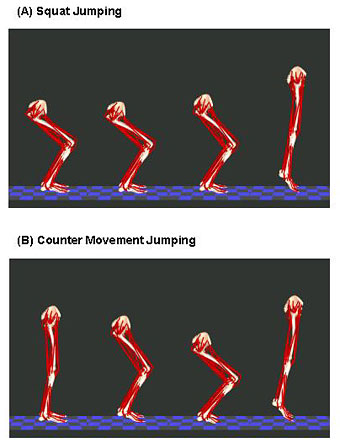
In order to study the jumping motions by using a model that resembles the real human body, we constructed a three-dimensional simulation model. This model consists of nine segments, including 86 lower-limb muscles (43 for each leg), and has 20 degrees of freedom (Fig. 2). By using this model, we simulated two types of jumping motions: squat and counter movement jumps (Fig. 3) ( --> see Reference (3)). In terms of the movement kinematics, jumping height, and movement pattern of the muscles, the simulated results of the jumping motion are very similar to those of the real human body. |
|
|
Fig. 3 The generated jumping motion.
(A) Jumping motion without a reaction movement, (B) Jumping motion with a reaction movement. |
| Further, we modified the model (Fig. 4) in order to simulate the walking motion of the human ancestor Australopithecus afarensis (Fig. 5) ( --> see Reference (7)). The computed value of the energy consumption required for A. afarensis to perform erect bipedal locomotion was similar to that for the modern human who was scaled-down in terms of the height and weight. This observation can be considered to support the theory that A. afarensis individuals had been walking on their two legs. |
|
|
| Fig. 4 Muscle skeleton model of the lower limb of Australopithecus afarensis. The shape and position of the attachment of the muscles are different from those of the modern human body. |
Fig. 5 Posture at the instant when the calcaneus of the right leg touches the ground during walking motion. |
|
| [4] Methodology for the three-dimensional simulation of physical movements |
|
|
In order to further disseminate and develop the results obtained using the abovementioned approaching method, we summarized the fundamental methodology required for performing this type of simulation and have presented it in academic journals.
The following five papers have been published (as of January 2006): “Method of constructing a muscle model and notices for using the model” ( --> see Reference (6)), “Construction method and characteristics of a directional cosine matrix in the three-dimensional space” ( --> see Reference (10)), “Representation method of a rigid-body motion in the three-dimensional space” ( --> see Reference (11)), “Mechanical solution presented by Kane and Levinson (1985)”, and “Specific method for constructing a three-dimensional skeletal system using AUTOLEV”.

| [1]
|
Kane, T.R. and Levinson, D.A. (1985). Dynamics:
Theory and Applications. McGraw-Hill, New
York, NY, USA. |
|
|